阵列式大口径反射镜背支撑结构当前位置:首页 > 科学技术 > 研究进展
阵列式大口径反射镜背支撑结构
文章来源:科技信息中心编辑室 时间:2018-01-10 访问数:
共1页 1
兆焦耳级ICF装置靶场传输光路采用阵列式集束排布,光束数量多、间距小(约70 mm),要求靶场千余块关系到打靶精度(50 mm)和能量的大口径传输反射镜采用阵列式背支撑结构形式支撑,而国内现有装置的反射镜支撑结构均为周圈夹持支撑方式,目前国内对此类大口径背支撑结构尚未进行系统研究,其设计难点在于结构中镜片的面形控制、调节控制,以及稳定性、连接形式、系统洁净等问题。
1 大口径反射镜背支撑总体结构设计
典型的大口径反射镜背支撑结构设计构型如图1所示,由镜架、镜框组件以及两者之间的运动学支承组成。其中,镜架为一次安装件,是镜框组件的安装基础,其上安装有运动学定位块。
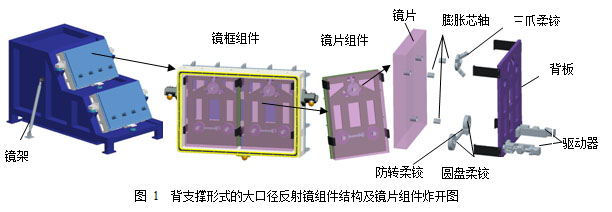
镜框组件设计为可更换元件,可以实现在线的全闭环洁净快速更换。其结构由两组镜片组件、外部支撑框以及运动学定位球头组成,与镜架之间通过运动学支承精确定位,镜框前表面与镜架的斜面间通过镜框组件上的密封圈压紧密封,镜框组件、镜架构成密闭的腔体,满足了系统内部密封洁净的要求。
镜片组件由K9光学镜片、膨胀芯轴、背部连接板、柔性铰链和背板组成。预先在镜片背部加工三个沉孔,安装膨胀芯轴于沉孔中,膨胀芯轴连接镜片和背部连接板,背部连接板与背板之间通过柔性铰链连接。
设计中将反射镜组件的稳定性设计指标(在环境输入功率谱密度为1′10-
镜片的面形精度直接影响光束质量和能量,通过优化镜片连接点位置和尺寸、采用膨胀芯轴连接镜片和金属结构、采用柔性铰链减小冲击振动等外载对镜面的不良影响,并通过试验测试确定最优支撑连接方案保证面形精度的最优化。镜片附加面形分析结果为136 nm。
2 膨胀芯轴连接结构
背支撑结构的关键技术之一是如何实现K9光学镜片与金属结构件的低应力连接,设计多间隙槽形式的膨胀芯轴连接结构,如图3所示,保证镜片孔受力均匀,无应力集中点,减少镜面变形的增加。
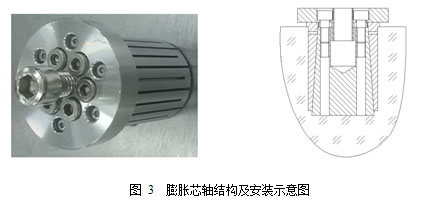
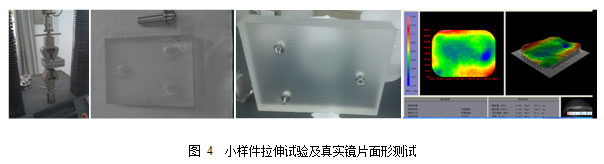
膨胀芯轴选择与K9镜片线膨胀系数相匹配的4J45铟钢材料,减小温度对光学镜片的影响。计算表明每颗螺钉的拧紧力矩大于8 cN×m即可提供大于镜片质量的胀紧力。拉伸试验(见图4)结果为当拉伸速率2 mm/min,每颗螺钉拧紧力矩60 cN×m时,破坏力在835~1327 N,试验表明破坏力大小与孔轴直径方向的加工误差有关。安装膨胀芯轴前后的610 mm′440 mm′85 mm K9镜片的镜面变形测试(见图4)表明,在不同拧紧力矩下镜片面形变化在50 nm以内(总指标为210 nm)。
分析和试验结果表明,此种结构在胀紧力和面形变化实现定量控制的同时,连接稳定可靠,方便拆卸,适用于ICF装置大口径反射镜背支撑连接结构。
3 柔性铰链支撑连接结构
为避免支撑结构由于机械或热变形对镜面产生不良影响,增加柔性铰链环节,通过其弹性变形产生的有限可控的精确运动,抵消镜架传来的变形;由于柔性铰链具有无间隙、无摩擦、无需润滑的特点,特别适用于洁净环境下的高精度调节结构。柔铰的设计直接影响镜片的稳定性和调节精度指标的实现。
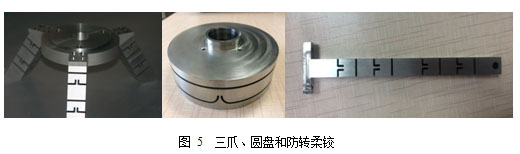
柔性环节设计了如图5所示的三种柔铰结构,具体安装位置如图1所示。根据反射镜需要实现两维方向上的运动自由度要求,混联的三爪直圆切口柔铰作为镜片的转轴支点,其自由度约束情况相当于关节轴承,即约束镜片的三个平动自由度,放开三个转动自由度。圆弧切槽的圆盘柔铰构型作为镜片俯仰和偏转的驱动点,其自由度为两个旋转自由度,在驱动器作用下可以实现镜片的俯仰和偏转运动。镜片的最后一个面内旋转自由度由在背部支撑板和镜片间设置的防转柔铰控制,其轴向不可压缩和伸长。
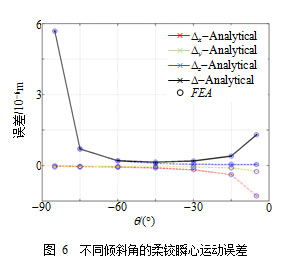
课题完成了柔铰的刚度(柔度)分析以及端部运动精度分析,并且采用有限元分析方法对分析结果进行了验证。图6为理论计算和有限元分析得到的三爪柔铰顶端在不同倾斜角下的瞬心运动误差情况,可以看出,两种结果非常吻合,当|θ|在45°附近取值时,总运动误差值最小。