
水下近程目标激光探测技术当前位置:首页 > 科学技术 > 研究进展
水下近程目标激光探测技术
文章来源:科技信息中心编辑室 时间:2018-03-14
共1页 1
无论是海事搜救、海洋勘测等民用领域,还是水下侦察、反潜反导等军事领域,对水下目标的探测技术都有广泛而迫切的应用需求。凭借声场在水中传播距离远、能量损耗小的独特优势,声呐探测已成为水下目标探测的主要手段。然而,由于声波波长较长,易受噪声干扰等因素,声呐探测技术存在目标分辨率低、混响干扰严重等诸多缺点。而光电探测技术则能够在一定程度上弥补声呐技术的不足,具有探测分辨率高、方位距离识别准确等优点。但是,由于水体(尤其是浑浊水体)中不仅含有水分子和无机溶解质,还悬浮着大量的浮游植物、矿物颗粒以及可溶性有机物(黄色物质)等,即使采用适合水下传输的蓝绿激光,它们对传播光束也具有强烈的吸收和散射作用。因此,研究蓝绿脉冲激光的水下传输行为和信号处理方法,对研制水下小型激光近程探测系统具有重要意义。
1 水下脉冲激光传输理论与物理建模
蓝绿脉冲激光在水下传输的后向散射一直是影响其探测性能的一个重要因素。由于水体中含有大量光散射颗粒,水体物理模型可描述为大量高散射、低吸收颗粒悬浮的随机散射介质。鉴于散射介质复杂的内部结构,数学上严格求解复杂边界条件下的麦克斯韦方程和辐射传输方程极其困难,因而这两种方法很少用于求解光在散射介质内部的多重散射问题。
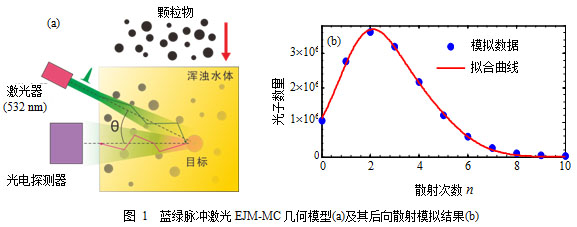
课题组在前期研究工作的基础上,建立了扩展琼斯矩阵——蒙特卡罗(EJM-MC)方法,对波长532 nm脉冲激光在水下的传输过程进行了建模分析。与只考虑光能量传输的经典Stokes—Mueller蒙特卡罗模拟方法不同,EJM-MC能够完整地描述传播过程中所有光子的偏振信息和相位信息。基于图1(a)所示的几何模型,我们在模拟参数的初始化时采用反函数随机取样方法,对激光器发出的脉冲波形进行了时间尺度0.1 ns的离散化采样,入射光子总数2×107。此外,我们也利用相同方法,对水体中的颗粒物尺寸进行了反函数随机取样,并基于Mie散射理论描述了它们与入射光子之间的单次散射事件。
通过光子追踪方式,EJM-MC对所有入射光子进行了建模仿真。图1(b)是对探测器接收到的后向散射光子的统计分析。可以看出,水下激光的后向散射以散射次数较少的弱散射光子为主,单次散射和多重散射的光子相对较少。此外,模拟研究发现,这一特性几乎不随水体的浑浊程度(颗粒物浓度)而发生变化。该理论模型对理解水下蓝绿脉冲激光的后向散射行为具有重要意义。
2 滤波算法及其实验结果
以铝合金板(40 cm′40 cm)作为实验目标,对其进行了初步的水下蓝绿脉冲激光近程探测实验研究。采用水下光程差分方法,对实验所用自来水体进行了光学性质测量,衰减系数为0.13 m-1。入射激光的脉冲频率为7 kHz,脉冲宽度为14 ns,单脉冲能量仅为10 mJ。入水实验前,对装置中光电器件响应延时、光路结构附加光程等系统误差进行了标定。图2为目标距离不同(8,9,10 m)时回波信号与无目标背景信号的对比。其中,触发信号为PIN探测器感知的入射激光脉冲。
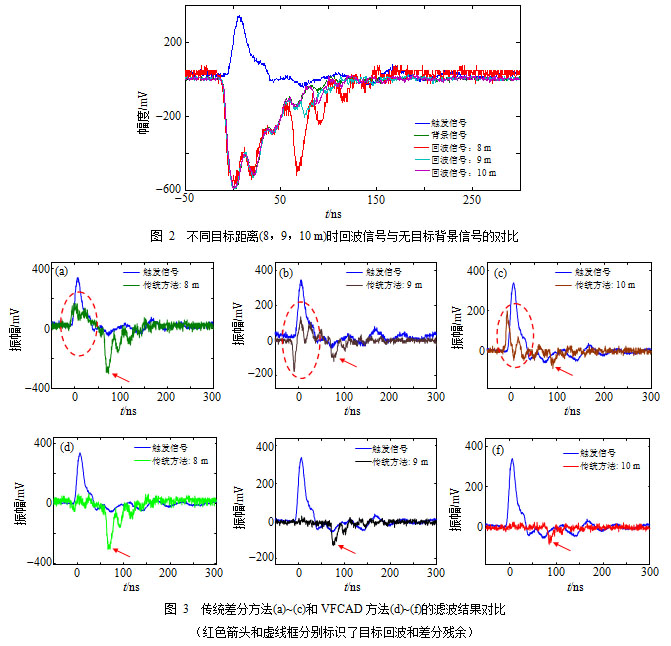
鉴于后向散射的严重干扰,我们对水下目标的回波信号处理进行了深入研究。由于激光脉冲的功率稳定性、光电探测器的增益波动等因素的影响,采用传统的回波信号与背景信号直接差分方法将难以识别出有效的目标信息。如图3(a)~(c)所示,当目标距离较远、回波信号微弱时,传统差分方法存在残差幅值远大于目标信号的问题;而在目标距离较近、回波信号较强时又存在时间分辨不准的问题。
考虑到水下激光后向散射的一致性,我们提出一种新的差分滤波方法——可变因子互相关自适应差分 (VFCAD)滤波算法,以解决传统差分方法在幅值和时间上的错误分辨问题,结果如图3(d)~(f)所示。通过对目标距离不同的强度差异回波的处理,VFCAD滤波算法能够有效提取出微弱的目标回波信号,具有较高的时间定位精度。