
总体工程研究所土工离心机器人研制有了新突破当前位置:首页 > 技术转移
总体工程研究所土工离心机器人研制有了新突破
文章来源:总体工程研究所 时间:2012-01-04
共1页 1
2011年11月11日,我院总体工程研究所为南京水科院研制的NHRI-400型离心模型试验辅助机器人的顺利交付,标志着总体工程研究所土工离心机器人研制有了新的突破,也标志着该类土工离心机器人研制能力达到国内领先、国际先进水平。
该机器人可在100g加速度下进行精确定位,实现离心模型试验中施工过程模拟,实施诸如填筑、开挖、注水和剖面变形等复杂动作。系统采用伺服电机驱动,四轴联动定位,具备不停机实现工具更换等功能。由于电机、驱动器、高精度传感器等在高离心场下使用需解决很多技术难题,且高离心场易引起结构变形甚至破坏,因此,经十余年的发展,国内外该类机器人才有几台投入使用。
在所领导、发展处的领导下,在动修队等兄弟单位的紧密配合下,NHRI-400型离心模型试验辅助机器人研制课题组克服重重困难,解决了在100g离心场下驱动控制、有限吊篮空间内机器人的大行程、双丝杠联动驱动、高离心场下结构变形对系统重复精度的影响、工具头360度旋转对管线的干涉、线缆和管路的排布与跟随、信号干扰等问题。该机器人各项性能参数都达到或超过预定指标,综合性能已达到国际先进水平。
NHRI-400型离心模型试验辅助机器人的成功研制,提高了总体工程研究所土工离心机器人的研制能力,提升了我院该类设备的市场竞争力。
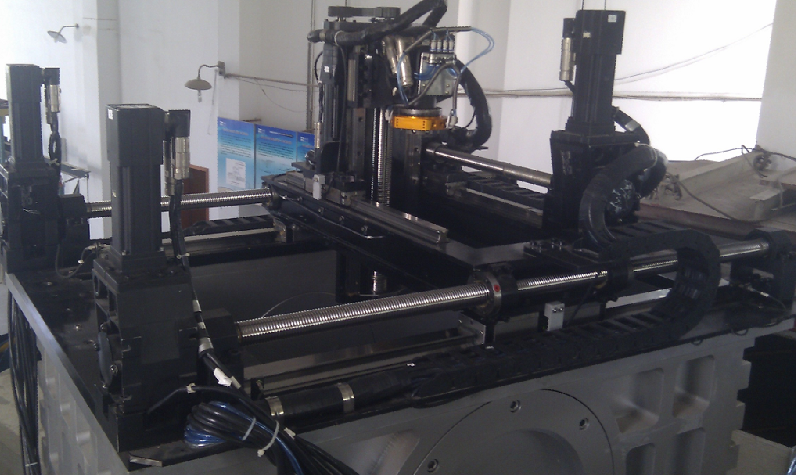
NHRI-400型离心模型试验辅助机器人外形
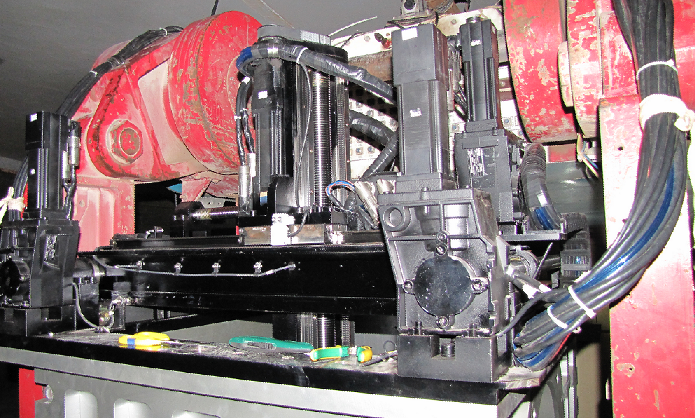
NHRI-400型离心模型试验辅助机器人安装于离心机吊篮